
ESA’s Technology Development Element (TDE) has signed a contract with COMEX of France for development of what’s called the Trailer robotic system.
This is a two-year project to test a novel architecture of robotic cooperation based on tandem rovers for lunar surface exploration missions.
ESA said that as it worked towards building the first permanent human outpost beyond Earth’s orbit, astronauts and robots would work together.
That would be a new era of space exploration, with missions to the lunar south pole and other moon locations.
“Robotic explorers are vital for searching for elements that could support a human presence on these extraterrestrial surfaces,” it said.
“These scouts will be operated either from Earth or from a base in lunar orbit, and they will need to perform certain tasks autonomously.”
The Trailer project aims to develop a rover system that comprises an agile and powerful rover called Tractor, equipped with high-performance mobility and navigation, local wireless transceiver, short-term energy storage and sample acquisition system.
The active Trailer would feature limited mobility and navigation, an onboard laboratory for sample analysis and storage and a communications system able to link to Earth.
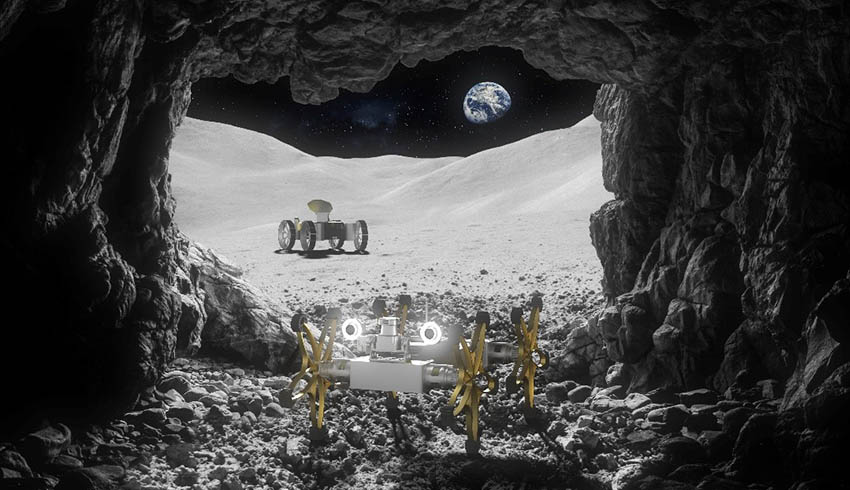
The ESA image shows what this could look like, with a four-wheeled rover in the background while a smaller insect-like walking rover explores a lunar cave.
The development activity will be led by COMEX with support from the German Research Center for Artificial Intelligence Robotics Innovation and the LIQUIFER Systems Group from Austria.
Make Space Connect a preferred news source on Google.